ras2fim/X-National_Datasets
├── WBD_National.gpkg
├── nwm_flows.gpkg
└── nwm_wbd_lookup.ncRAS2FIM
Executive Summary
As one of the foundational hydraulic modeling systems, HEC-RAS needs no introduction. This modeling system is so prolific that it’s one and two dimensional flood modeling capabilities provide the authoritative baseline for flood insurance and the default against which other modeling efforts compare. One of the most critical outputs of a HEC-RAS model is a Flood Inundation Map. However, as a complex piece of engineering and water resource science software, it’s use is difficult for many and not readily scalable. Starting with compliant one-dimensional HEC-RAS floodplain models, the RAS2FIM process can be used to create a library of flood depth inundation rasters for a range of storm water discharges. These libraries can be used with the National Water Model. More details can be found on the official repository at https://github.com/NOAA-OWP/ras2fim
Tutorials
How to install and set up RAS2FIM.
How to run RAS2FIM over sample data.
Explainers
What is RAS2FIM?
RAS2FIM can be thought of as a HEC-RAS mapper which runs RAS models with an eye towards densification of the model boundary conditions and subsequent FIM library creation with an eye towards NWM access patterns. It’s important to note that RAS2FIM, in both versions, hinge on the key inputs of an already constructed HEC-RAS 1D model and the National Water Model stream segments. This toolset was developed, tested, and deployed over BLE sourced HEC-RAS models, and it’s important to bear in mind that not every (and in fact, most) HEC-RAS models may not be compliant with the way the tools modify the model in order to create an inundation library. Additionally, without special modification, some models which are otherwise complaint will not generate a FIM library because of the explicit tie-in with the NWM access patterns or may otherwise be superceeded by a model which better conflates during the inundation process. Despite many of the technical hurdles and strict input data compliance standards (compared to geospatial flood modeling methods), the RAS2FIM method is one of the most widely deployed and deployable, hydraulically informed, means of generating FIM libraries.
RAS2FIM V1 vs RAS2FIM V2
The RAS2FIM approach has had two major versions, colloqually titled RAS2FM v1 and RAS2FIM v2. These versions both accomplish the same end goal of generating a FIM library using a compliant 1D HEC-RAS model for use in NWM access patterns, but the way in which they accomplish this has important implications in both the way you should conceptually frame the underlying processes and the ways in which we should interpret the outputs. Despite small differences in the expected form of the inputs, if you have set up your system for RAS2FIM v2 both v1 and v2 will execute.
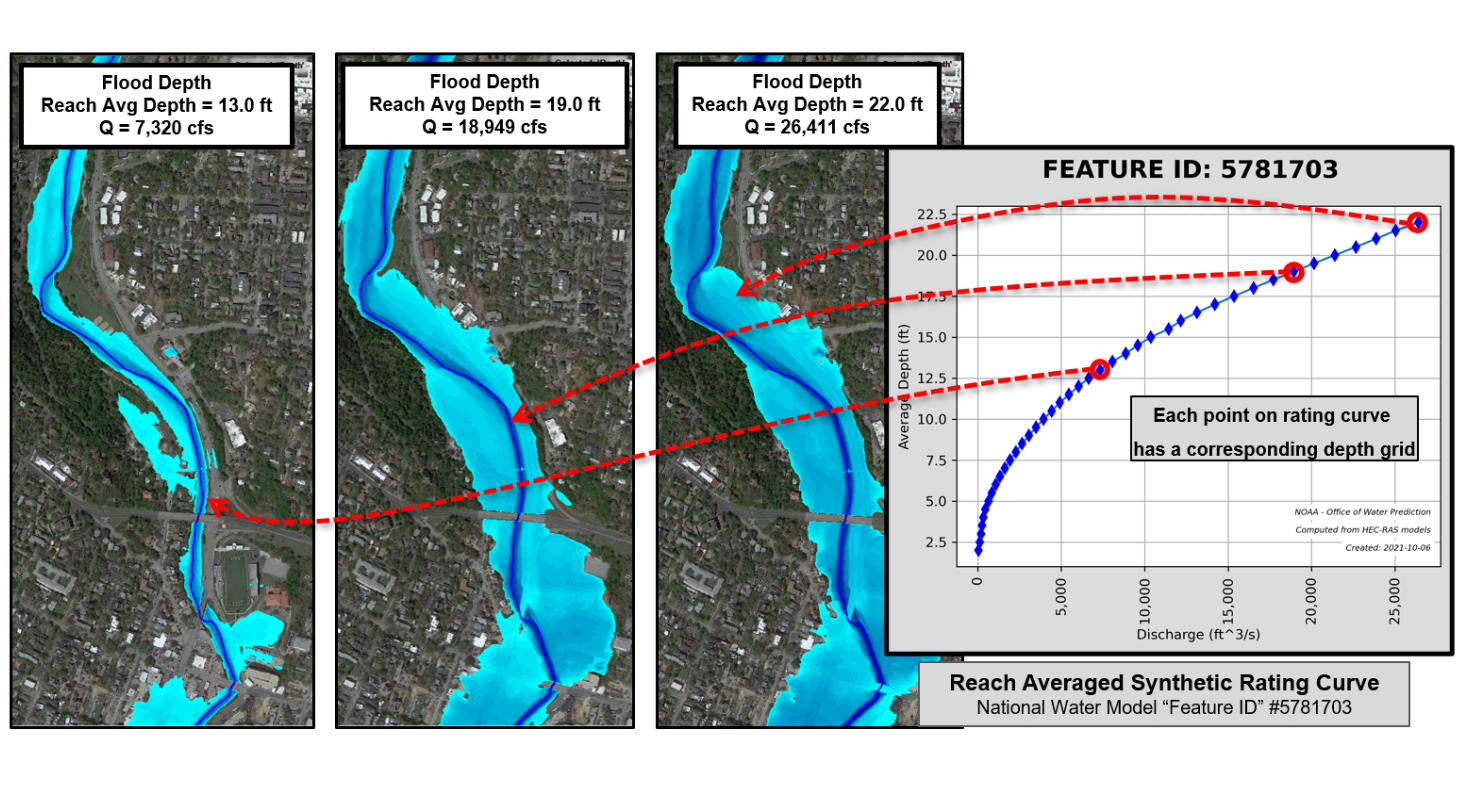
To talk about this, it’s worth defining some terms used. A “parent” model is the “raw” HEC-RAS model as it is pulled from a database. “Child” models are models that the RAS2FIM program modifies in some way. In RAS2FIM v1, these parent models are conflated to the NWM forecast network by identifying the model that has the most streamline points snapped to it, and taking a slice of the parent model + two cross sections in both the up and downstream directions. That subset of the parent model has it’s boundary conditions replaced upstream by a range of discharge values fed into it by the national database, and a normal energy gradeline boundary condition is applied to the downstream boundary condition. That model is then run numerous times to generate a stack of depth rasters that are modified to meet a standard, and then packaged for deployment. The rating curve is simply the depth average of all the cross sections for that model, and because the models were sliced to the NWM network prior to running there’s no need to aggregate the results.
In RAS2FIM v2, we take a slightly different approach in that the most appropriate model is still identified for a given NWM segment, but the parent model is used as a single monolith as opposed to being subset out. The differing boundary conditions are respected by the code base, but the boundary conditions are densified to create tighter increments, and then after the entire model is run the desired subset of rating curves are pulled out and used to calculate that reach averaged rating and the depth rasters sliced to create ID specific libraries. See how these compair here.
RAS2FIM with a 2D model?
Under development by Andy Carter, I’ve stubbed out this empty placeholder, check back soon1!
Critical RAS2FIM inputs
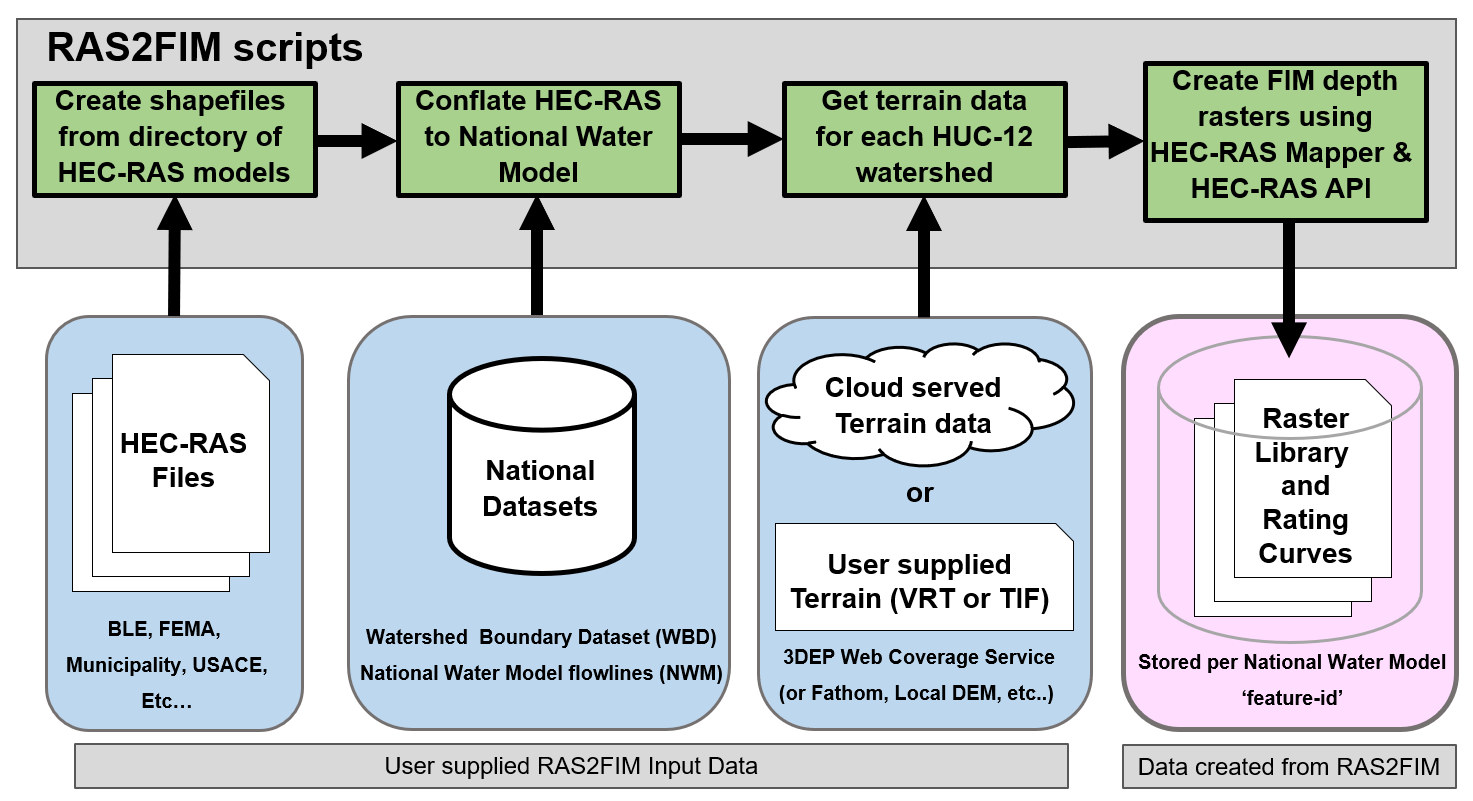
RAS2FIM Procerdural highlights
- Overview: The
ras2fimscript repository uses HEC-RAS models to generate data inputs for theinundation.pyprocess. These outputs are direct analogies for current HAND-based inputs, including a relative elevation model (REM), rating curve, and catchment identifiers. - Process Steps:
- Spatial Crosswalk: A spatial crosswalk is established between HEC-RAS model data and NWM stream reaches.
- First HEC-RAS Run: A run based on 75 evenly-intervaled flow values calculates depths for each RAS cross-section. Reach-averaged depths are created for each NWM feature ID and used to build a rating curve.
- Second HEC-RAS Run: A second simulation is run for equal interval stages (e.g., every 0.2 m). It uses the rating curve to determine the corresponding streamflow, then uses RAS Mapper to create inundation boundaries and depth grids for each stage.
- REM Generation: The
ras2remscript translates the depth grids into a single relative elevation dataset where pixel values represent the minimum stage to flood.
Unit handling
In RAS2FIM V1, units needed to be accounted for by the end user prior to generating a run. These units were used as the flag for the model parsing, and did not reflect the units of the input DEM. These could inadvertently be mismatched and the code did not account for that edge case. After version 1.11.0 (and beyond that) the units of the provided model would dictate the conversion of the DEM file regardless of their native value. So for example, if you had staged a DEM surface in meters and then provided models whose elevations were in feet, the program automatically converted that to the correct reference frame before mapping the resultant model surface.
HEC-RAS Model Limitations of RAS2FIM
![]()
Knowing beforehand whether a model is or is not going to successfully run through RAS2FIM is typically something we identify by trying, but there are a few hallmarks of a model that we aim to handle or are expecting that you should know. See those here.
- RAS2FIM currently assumed that all HEC-RAS models are composed of a single reach and a single river. If multiple reaches and rivers are in the HEC-RAS geometry file, only the first reach and the first river is evaluated.
- Only steady-state one-dimensional models can be evaluated. Unsteady and 2-dimensional models are not allowed to be used as input to the RAS2FIM workflow.
- Bridges, culverts and in-line structures are allowed in the provided HEC-RAS models. Storage areas, lateral structures, SA/2D Connections and 2D flow areas are not allowed.
- All models provided in RAS2FIM must be created in the same projection (CRS)
USGS 3DEP Terrain
- Terrain data provided in by the USGS 3DEP web coverage service is a composite of multiple sources in a variety of horizontal resolutions and accuracy. The RAS2FIM routine that grabs terrain from this service does not know the underlying source. In some portions of the the U.S., the terrain returned my be an up-sampling of a lower resolution source. (Example 3m returned from a 10m USGS source)
- A large request may result in a time-out of the USGS 3DEP WCS service and halt the terrain harvesting script.
Conflation
- Conflation may return the wrong HEC-RAS model especially for matches with low counts of snapped points. Confluences are the most likely area for a false snap.
- Two HEC-RAS models may ‘split’ a feature-id. The most popular wins, however a portion of each of the two HEC-RAS model maybe more correct. RAS2FIM simply picks the most popular and ignores the other.
Create Depth Grids
- Scripts may stall when a ‘bad’ HEC-RAS input is processed. This maybe points in the cross section that do not have increasing station. There are likely several other input file issues that can stall the HEC-RAS process.
- In HEC-RAS, cross sections that do not contain the flows will assume a glass wall along the edge. While the RAS2FIM will run, the glass walling will incorrectly compute a reach averaged depth for the given discharge and introduce error into the Synthetic Rating Curve (SRC).
Synthetic Rating Curves
- While rare, it is possible to compute a non-monotonic synthetic rating curve. This may cause the calculations of interpolation to stall.
Headwater Streams
- For upstream reaches strahler stream order 1, the assumption of a constant flow based on the entire contributing drainage area of the reach could lead to an over estimation of flood limits and depth on the upstream end.
Explainers
Core Inputs
The RAS2FIM input data directory:
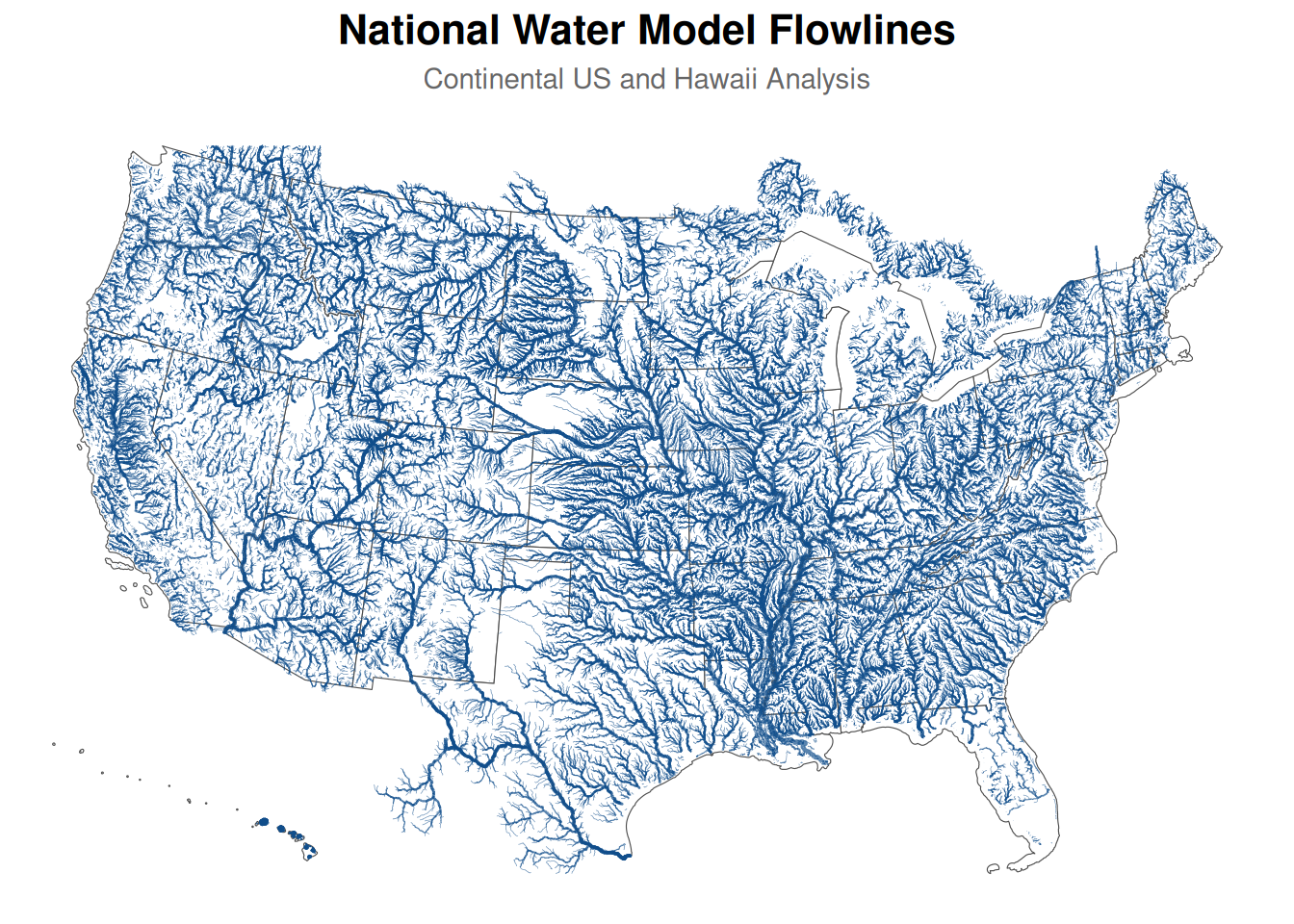
The RAS2FIM pipeline capitalizes on few core datasets and helpers to allow it to scale up to the National Water Model forecast domain. These include a flowpath definition (nwm_flows.gpkg):
Some handles to walk features across units (here I only show a subset) (nwm_wbd_lookup.nc):
| feature_id | huc8 | huc10 | huc12 |
|---|---|---|---|
| 101 | 12020002 | 1202000205 | 120200020504 |
| 179 | 01020003 | 0102000302 | 010200030204 |
| 181 | 01020003 | 0102000302 | 010200030204 |
| 183 | 01020003 | 0102000302 | 010200030204 |
| 185 | 01020003 | 0102000302 | 010200030204 |
| 843 | 01020003 | 0102000301 | 010200030102 |
| 845 | 01020003 | 0102000301 | 010200030102 |
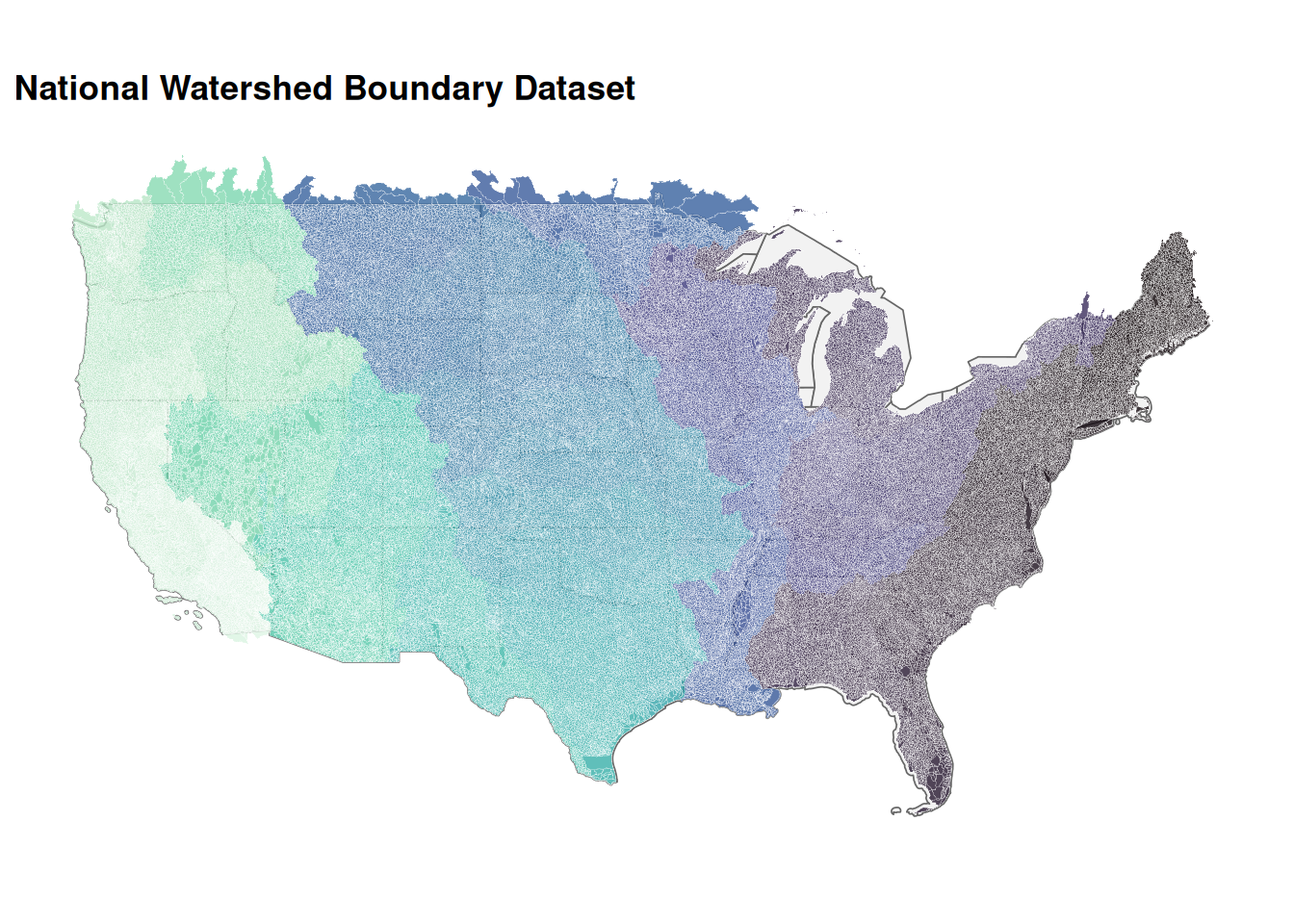
And basins to aid in footprint conflation (WBD_National.gpkg):
Footnotes
That’s soon in Jim time↩︎